SCROLL
WORKS
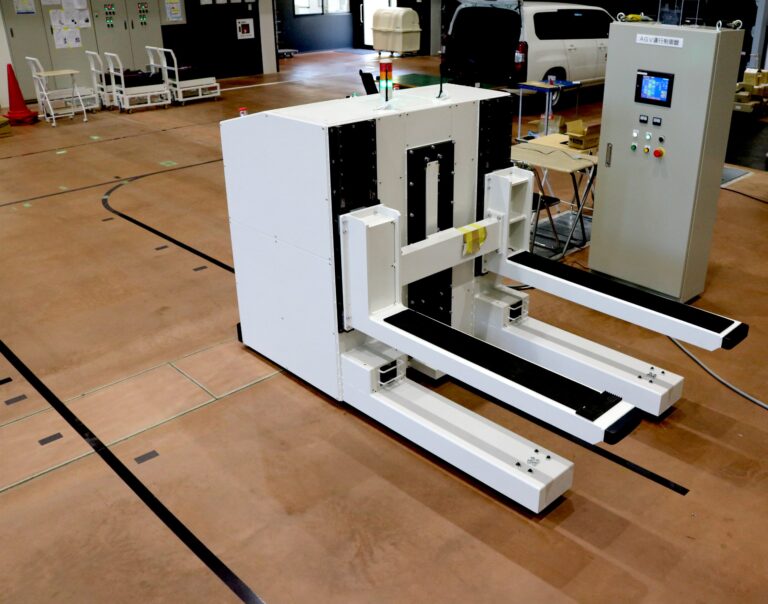
自ら積み込んで、自ら運ぶ。 ロボットアーム付きAGV

業種展示会向け
種類協働ロボット搭載型AGV
導入先展示会向け
協働ロボット搭載による人との共存
| 誘導方式 | ビジョンカメラによる画像認識(開発中) |
|---|---|
| 走行速度 | 最高60m/分 |
| 走行機能 | 自動走行、前後進、横行、斜行の全方位型 |
| 充電方式 | 接触式自動充電 ※非接触充電も提案します |
| 稼働時間 | 5~6時間 ※お客様の工程設計に合わせて提案します |


協働ロボット搭載型AGV
AGVの未来を感じさせる、「手」と「足」を備えたロボット
ロボットとの組み合わせにより搬送の可能性が広がる
様々な物資を載せて運搬するAGV。
工場の効率化の切り札として、業界全体から注目を集めています。
AGVとは、「運ぶ」ことに特化した機能を持つロボットです。これを人間の「足」だとすると、そこにロボットの「手」の機能を付け加えました。この組み合わせの考え方が次世代型のAGVといえます。シコウが将来の製品開発に向けて、特別につくったプロトタイプです。
開発の経緯:人ができることは、ほかにもある
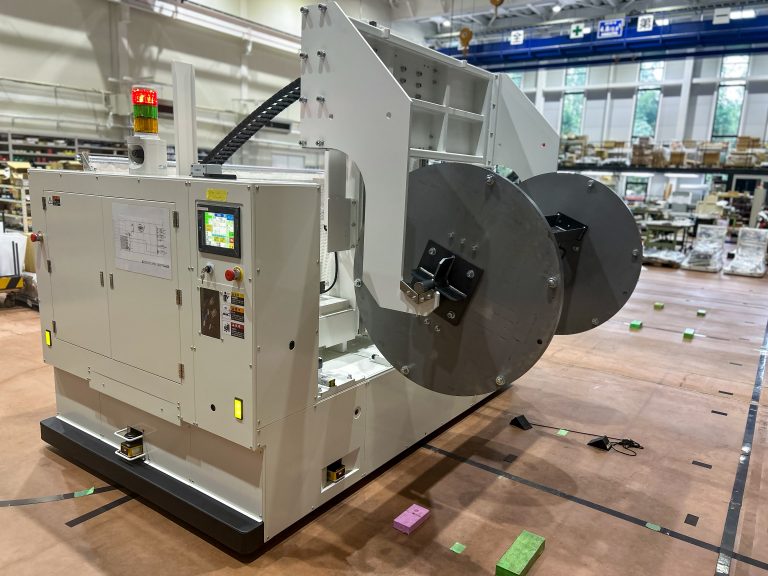
一つのロボットに手足が揃ったことは、とても大きく可能性を広げます。これは、自分で荷物を積み込むAGVであり、移動できるロボットアームです。自ら部品をピックアップし、ラインの様々な場所に出現して、アームで組み立て作業を行うなど、より高度な仕事を自動化することができるでしょう。
製造業のより一層の効率化を目指す。大きな可能性を表現した次世代型のAGVです。
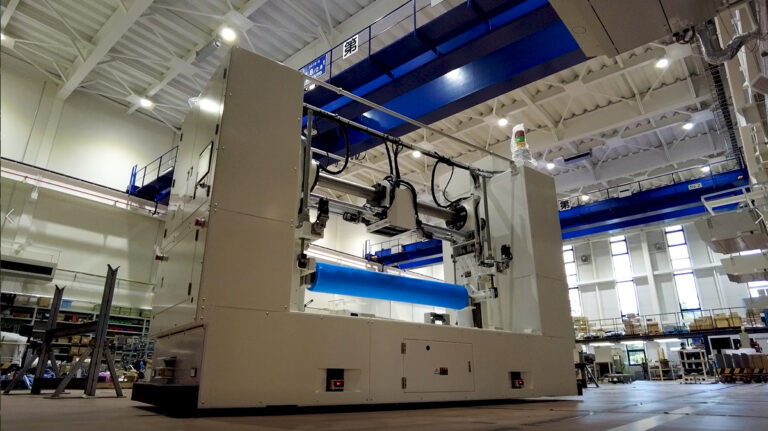
ビジョンナビゲーション方式による無軌道化開発
また、このAGVの特徴は磁気コースを使わずに無軌道で走行できることです。
カメラでとらえたコントラストをもとに、自己位置の認識と距離計測をします。予めマップに置いた地図データと照らし合わせ、設定した走行経路を無軌道で走行します。
※ビジョンナビゲーション方式は検証段階です。実際に現場で使用するには継続した開発が必要となります。


WORKS
関連する導入事例
-
-768x588.jpg)
40トンの荷物を積載しながら ±1㎜の精度で停止する高性能
業 界製造業
種 類重量級型AGV
誘導方式磁気誘導
-

最大2000食の食事配膳をAGVによって自動化
業 界刑務所
種 類低床型AGV
誘導方式磁気誘導
-

地上高250ミリの低床コンベアと連動、オーダーならではの柔軟設計
業 界製造業
種 類コンベア型AGV(低床コンベア)
誘導方式磁気誘導
-

コンベア間の水平搬送で 荷崩れ無しの工程間搬送を実現
業 界食品加工業
種 類コンベア型AGV
誘導方式磁気誘導
-

AGVを活用した スマートファクトリーの実現
業 界製造業
種 類けん引式AGV
誘導方式磁気誘導
-
フォークリフトからAGVへの転換で、作業効率化を実現
業 界合板製造業
種 類フォークリフト型AGV
誘導方式磁気誘導
















-768x432.jpg)

