SCROLL
WORKS
25か所からの個別の要求に応えて、部品を自動搬送するシステム

業種製造業
種類コンベア型AGV
導入先某自動車部品メーカー
解決策「搬送要求ボタンでAGV呼び出し」
| 車体寸法 | W700×L1330×H775 |
|---|---|
| 積載重量 | 最大100kg |
| 搬送対象 | コンテナ |
| ステアリング | 前輪ステアリング方式 |
| 走行速度 | 最高50m/分(直線走行時) |
| 走行機能 | 前進 |
| 誘導方式 | 磁気誘導 |


複数ラインに部品供給するコンベア搭載型無人搬送車(某自動車部品メーカー)
導入前のお客様課題
倉庫に収納された部品を加工ライン(25ヶ所)まで作業者が台車で手搬送し供給していましたが、遠いところで200m程あり一日何往復もするので、かなりの重労働でした。
また、台車搬送中に他のラインからの要求があった場合は、別の作業者が準備し搬送するため作業員が何人も必要となります。

導入後のお客様の声
搬送がほぼ自動となったため、作業者は倉庫前での部品供給のみとなり、人手を他の作業へまわすことが出来るようになりました。
また、AGV(無人搬送車)稼動中は次の搬送準備に当てることができるようになりました。時間の無駄が省け、余裕ができたことで、間違った部品を運ぶなどというミスが全くなくなったそうです。
システムの概要
倉庫前2ヶ所の待機ステーションでAGV(6台)に、各ライン(25ヶ所)の搬送先から押ボタンにより搬送要求があります。搬送要求は全て運行制御盤に集約され、AGVへ無線通信で行き先指示を伝送します。
作業者は、倉庫前で準備できた供給部品を手動にてAGVコンベアに積載し発進スイッチにて始動します。目的ステーションに到着するとAGVは待機となり、周囲の作業者が地上コンベアに手動で降載します。
倉庫前の待機ステーションに移動する際、空のコンテナがあれば回収し、次の搬送指示を待ちます。
AGVはバッテリーを搭載しており、一日の稼働時間(8:30~17:30)のうち使用できるのは約4時間のため午後には予備バッテリーに入れ替えます。入れ替えたバッテリーは手動充電装置にて充電され、次の交換まで充電しておきます。
充電器は満充電になると、自動で充電動作を終了する過充電保護機能付です。
WORKS
関連する導入事例
-

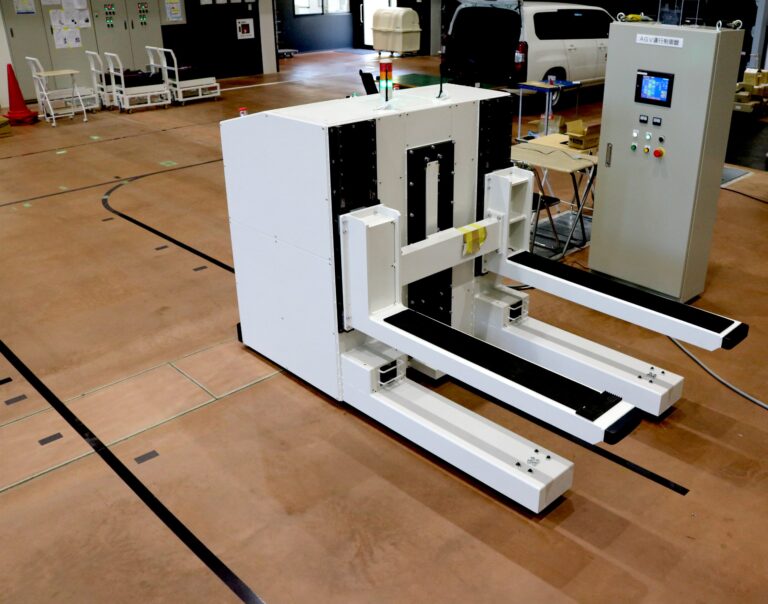
既存設備に合わせ ローコストな無人搬送を実現
業 界製造業
種 類スライドリフト型AGV
誘導方式磁気誘導
-

将来的なルート改造も見越した 磁気誘導方式へのリプレイス
業 界製造業
種 類けん引型AGV
誘導方式磁気誘導
-

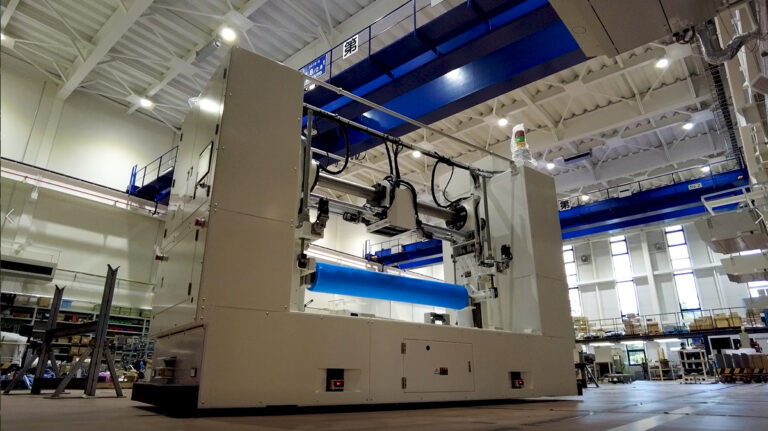
大型のAGVだからこその安全搬送を実現
業 界製造業
種 類重量級型AGV
誘導方式磁気誘導
-

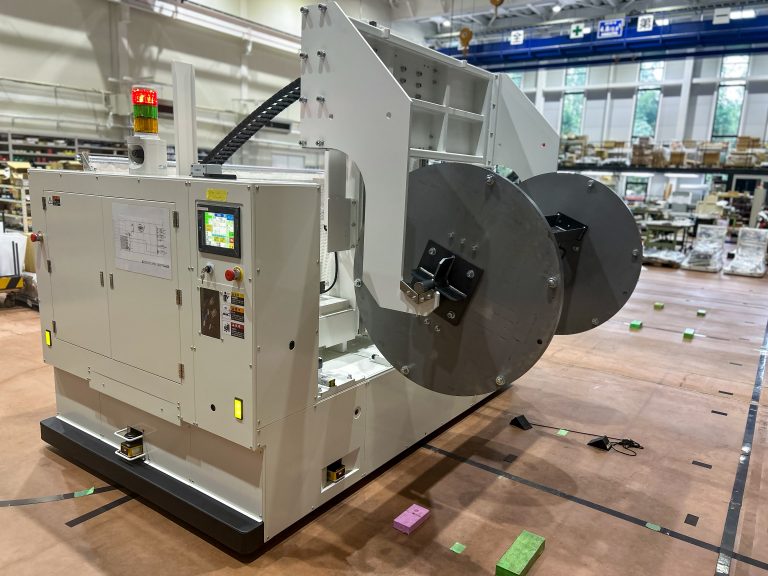
様々なワークに対応する コンベアガイド伸縮機能
業 界印刷業
種 類コンベア型AGV
誘導方式磁気誘導
-

離れた工場間を自動で結ぶ 屋外走行可能なAGV
業 界物流・倉庫業
種 類特殊型AGV
誘導方式磁気誘導
-

既存コースを活かしながら 効率と操作性を大幅に向上
業 界製造業
種 類けん引型AGV
誘導方式磁気誘導


















-768x432.jpg)


